Mining Optimization Algorithm
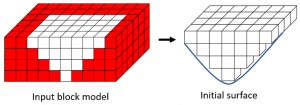
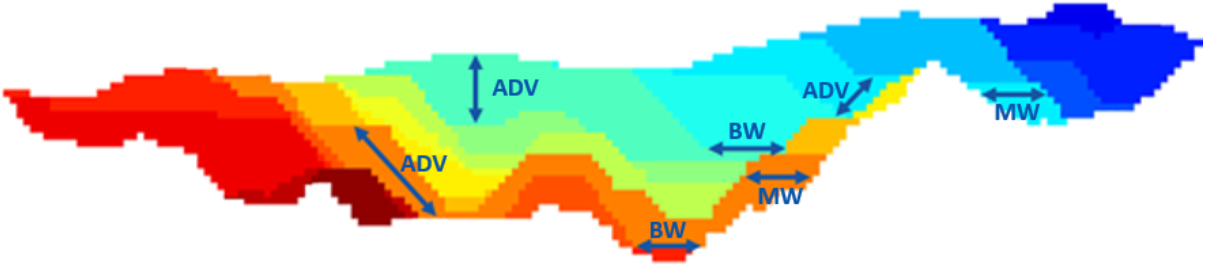
The first step of the mining optimization algorithm is to remove regions that do not add any value to the project. This is an initial assessment that considers slope constraints, reducing the size of the problem and providing a region of interest for the optimization process. Since MiningMath always employs surfaces in its mathematical formulations, this first set of likely profitable blocks are contained within an initial surface as depicted in Figure 1.
- \(e_{c,t-1} - e_{c,t} \ge 0, c=1,...,M, t=2,...,T \)
Intuitive idea
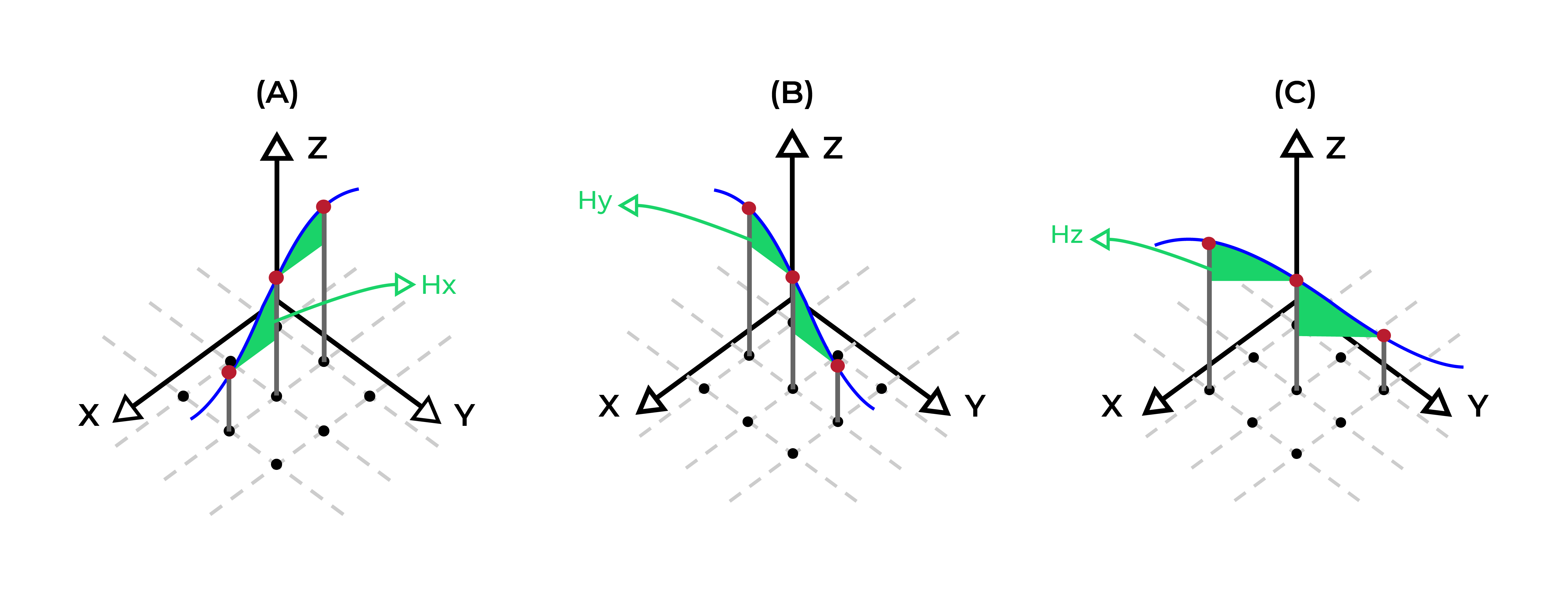
- Adjacent elevations in a single surface need to respect a maximum difference. This maximum will change based on which direction they are adjacent: x, y, or diagonally.
Requirements
- \(H_x, H_y, H_d\): maximum difference in elevation for adjacent cells in \(x\), \(y\) and diagonal directions
- \(X_c, Y_c, D_c\): equivalent to \(H_x, H_y, H_d\)concept, the sets of adjacent cells, laterally in \(x\), in \(y\), and diagonally, for a given cell \(c\), respectively.
Formulation
- \(e_{c,t} - e_{x,t} \ge H_x, c=1,...,M, t=1,...,T, x \in X_c\)
- \(e_{c,t} - e_{y,t} \ge H_y, c=1,...,M, t=1,...,T, y \in Y_c \)
- \(e_{c,t} - e_{d,t} \ge H_d, c=1,...,M, t=1,...,T, d \in D_c \)
Proprietary constraints not disclosed. Possible examples of constraints of the same type, but not the ones actually employed.
Intuitive idea
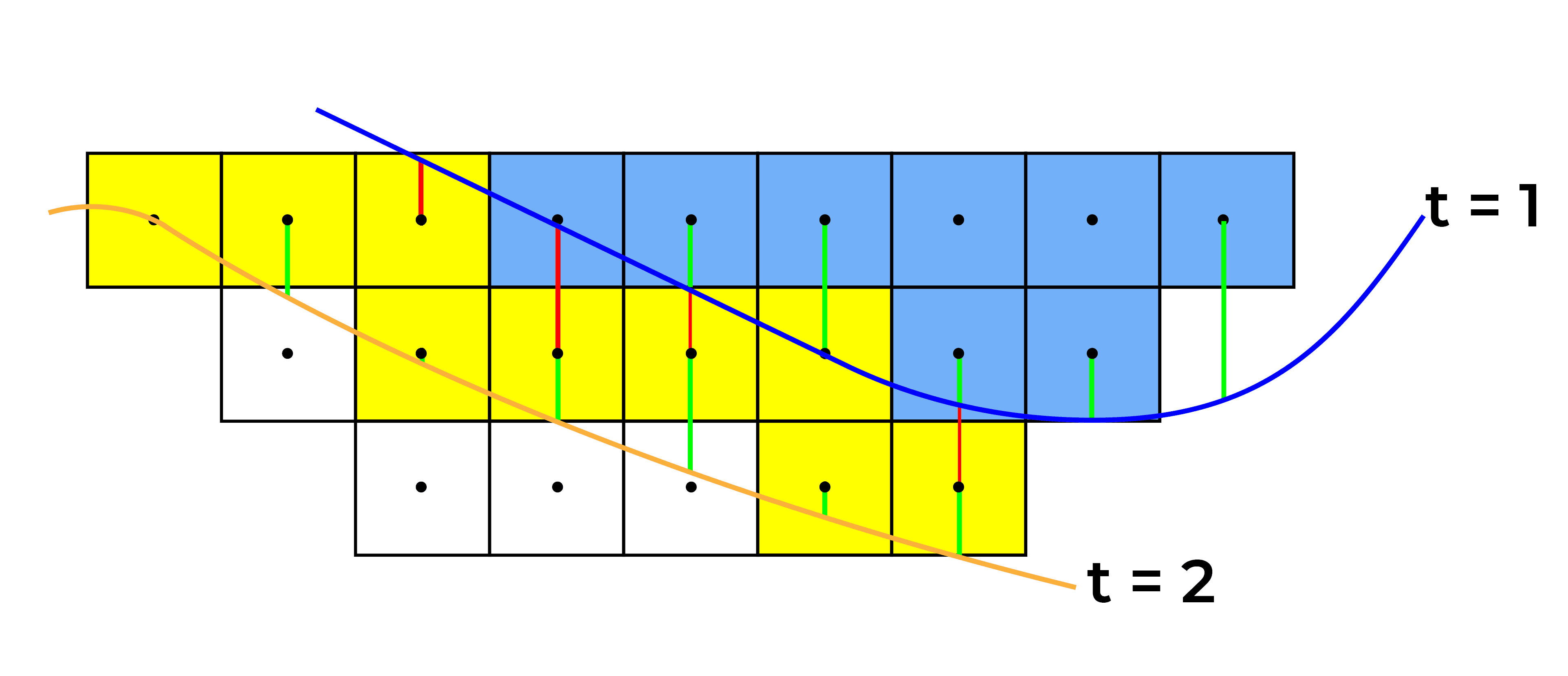
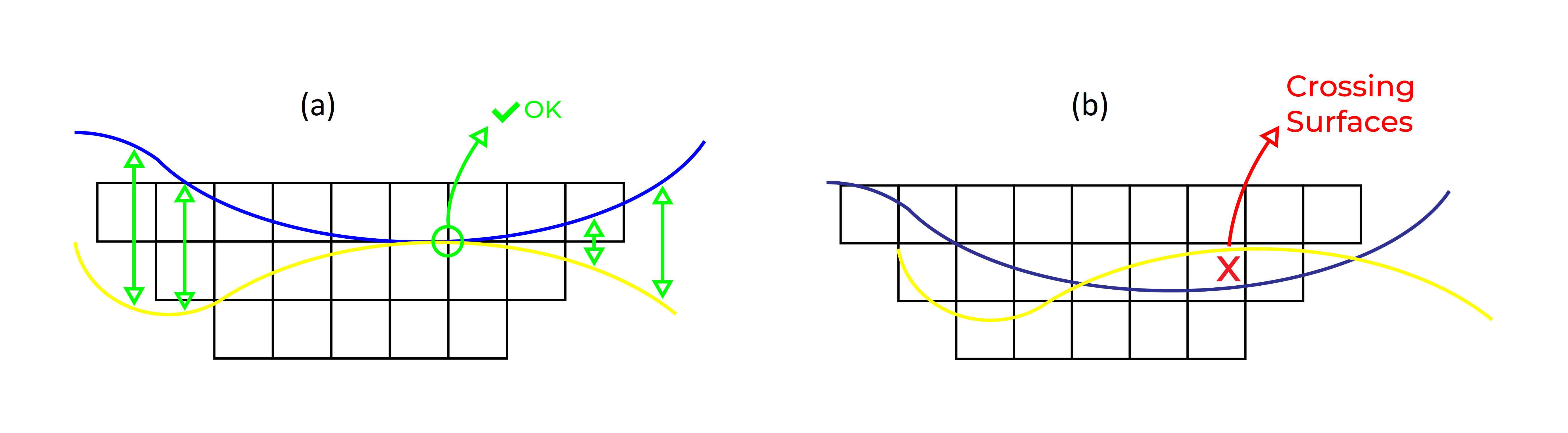
- Surfaces will define when blocks will be mined. For example, blocks between surfaces associated with period 1 and 2, will be mined in period two. A block is between two surfaces if its centroid is between the two surfaces.
Requirements
- \(E_{c}^{z}\): elevation of centroid for a given block \((c, z)\)
Formulation
- \(E_{c}^{z} \times \sum\limits_{d=1}^{D}x_{c,1,d}^{z} \ge e_{c,1}, c=1,...,M, z=1,...,Z\)
- \(e_{c,t-1} \ge E_{c}^{z} \times \sum\limits_{d=1}^{D}x_{c,t,d}^{z} \ge e_{c,t}, \)\(c=1,...,M, t=2,...,T, z=1,...,Z\)